简介
规格
扩展/配件
软件
技术支持文件
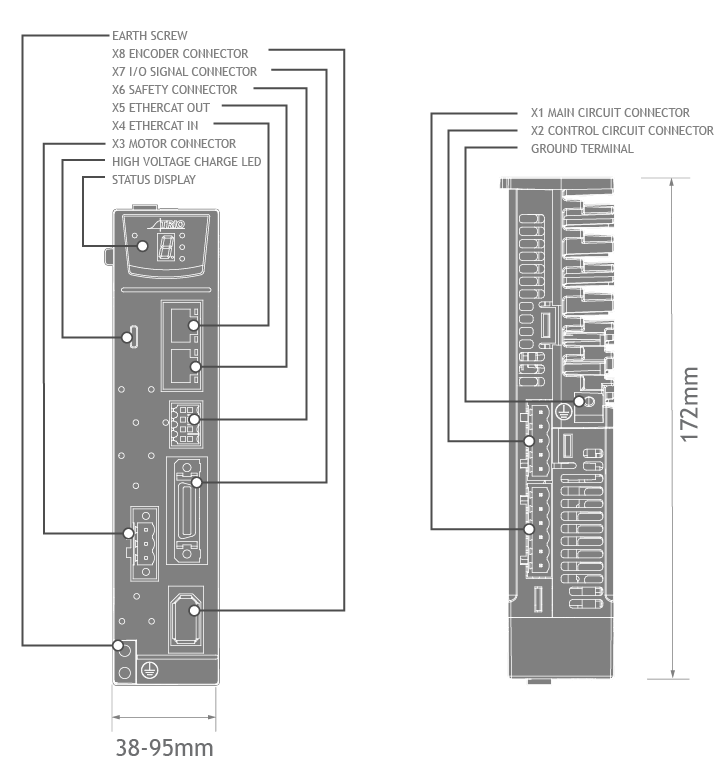
DX4
交流伺服驱动器
D0100 - D0108
介绍Trio的解决方案,包括新的DX4伺服驱动器,我们全新的驱动器和电机套件,提供性能和可靠性,在每个细节上都进行了优化,以更少的花费做更多的事情。

强调
- 驱动和运动协调完全集成到运动完美
- 配合MX电机系列的中、低惯量电机
- 支持EtherCAT,更新速率降至125us
- 紧凑的尺寸
- 零叠加安装
- 功能安全双STO (SIL3, PLe)
- 200Vac从50W到3kW
- 20位增量或23位绝对编码器接口
- 350%过载能力
- 内部驱动保护功能
- 7个数字输入,2个专用触摸探针输入位置锁定
- 4个数字输出,第二编码器接口,适用于双编码器应用
- 综合调谐技术包括:自动调谐功能,自适应振动抑制,摩擦补偿
- 现场升级固件
DX4有三种框架尺寸,额定功率从50W到3kW。设计与MX电机和配件相匹配,它提供了高速,高精度的设备解决方案。
DX4设计用于与Trio EtherCAT控制器无缝工作,并完全集成到Trio的应用程序开发工具Motion Perfect中,允许从一个工具进行完整的机器配置;调试、诊断和编程。
DX4注重易用性,最大限度地减少了安装时间,使专注于应用程序。
你需要的一切

DX4伺服驱动器和电机在功能和性能上进行了优化,可在要求苛刻的以运动为中心的设备自动化中提供基于伺服的可扩展解决方案。
为你的解决方案提供一个界面

DX4完全集成在Motion Perfect中,Motion Perfect是我们用于系统规划、配置和机器编程的软件工具集。
这个新版本经过改进,使设置、诊断和调试更加直接。基于Trio的Motion-ix核心技术,它为用户提供了一个重新设计、易于理解的界面,用于快速应用程序开发、控制器和驱动器配置以及功能监控。
Trio-运动控制专家

TRIO-运动控制专家,动作是我们的核心能力,而不仅仅是一种固定能力。
我们将运动控制专业与设备自动化技术相结合,为客户提供性能领先的自动化解决方案。
| 驱动器型号 | 输出功率 | 高度 (mm) | 宽度 (mm) | 深度 (mm) |
|---|---|---|---|---|
| DX4-1A5A | 50W | 172 | 38 | 180 |
| DX4-101A | 100W | 172 | 38 | 180 |
| DX4-102A | 200W | 172 | 38 | 180 |
| DX4-104A | 400W | 172 | 38 | 180 |
| DX4-108A | 750W | 172 | 65 | 180 |
| DX4-110A | 1kW | 172 | 65 | 180 |
| DX4-115A | 1.5kW | 172 | 65 | 180 |
| DX4-120A | 2kW | 172 | 95 | 180 |
| DX4-130A | 3kW | 172 | 95 | 180 |
| All Models : Voltage = 200Vac | ||||
| Drive Model: DX4- | 1A5A | 101A | 102A | 104A | 108A | 110A | 115A | 120A | 130A | |
|---|---|---|---|---|---|---|---|---|---|---|
| Continuous Output Current [Arms] | 0.9 | 1.1 | 1.5 | 2.9 | 5.1 | 6.9 | 8.2 | 11.3 | 16 | |
| Instantaneous Max Output Current [Arms] | 3.3 | 4 | 5.8 | 11.5 | 19.5 | 21 | 24.6 | 33.9 | 54 | |
| 所需供电 Capacity [kVA] | Single-phase | 0.2 | 0.3 | 0.6 | 1.2 | 1.9 | 2.6 | 4 | - | - |
| Three-phase | 0.2 | 0.3 | 0.5 | 0.9 | 1.6 | 2 | 3 | 3.5 | 4.5 | |
| 所需供电 | Main Circuit | Single-phase or Three-phase 200V ac to 240V ac. • -15% to +10%, 50Hz or 60Hz 270V dc to 324V dc. • -15% to +10% DX4-115* is de-rated to 1.2kW when used with a single-phase supply. DX4-120* and DX4-130* can only be used with a three-phase supply. |
||||||||
| Control Circuit | Single-phase 200V ac to 240V ac • -15% to +10%, 50Hz or 60Hz 270V dc to 324V dc. • -15% to +10% |
|||||||||
| Control Method | SVPWM | |||||||||
| Feedback |
Encoder Type F - 20bit incremental– provides 20bit resolution in a single rotation. Encoder Type L - 23bit absolute single-turn. The addition of the battery option provides a 16bit count of number of turns with 23bit resolution per turn. |
|||||||||
| Environmental Conditions | Temperature | Ambient temperature: -5˚C to 55˚C (recommended max ambient temperature not above 40˚ for zero stacking installation). Storage temperature: -20˚C to +85˚C |
||||||||
| Humidity | Both operating and storage: 5% to 95% (with no condensation). | |||||||||
| Protection Class | IP20 | |||||||||
| Altitude | 1,000m or less | |||||||||
| Vibration Resistance | 4.9m/s2 | |||||||||
| Shock Resistance | 19.6m/s2 | |||||||||
| Power System | TN System | |||||||||
| 安装 | Base-mounted | |||||||||
| Performance | Speed Control Range | 1:5000 | ||||||||
| Coefficient of Speed Fluctuation | ±0.01% of rated speed max. (For a load fluctuation of 0% to 100%) 0% of rated speed max. (For a rated voltage fluctuation of ±10%) ±0.1% of rated speed max. (For a temperature fluctuation of 25°C±25°C) |
|||||||||
| I/O Signals | Second Encoder Input | Supports A, B, and Z TTL differential type sensor signal. Maximum line frequency of 500kHz. | ||||||||
| Input Signals | Allowable Voltage range: 24 V dc ±20% Number of input points: 7 (2 for high-speed optocoupler inputs, fixed as Touch Probe) Touch Probe Signals: TP1 (Touch Probe 1), TP2 (Touch Probe 2). All other inputs are general purpose but can be assigned specific functions during commissioning. These inputs can also be inverted so act as active-low. |
|||||||||
| Output Signals | Allowable Voltage range: 5V dc to 30V dc Number of output points: 4 All outputs are general purpose but can be assigned specific functions during commissioning. These outputs can also be inverted so act as active-low. |
|||||||||
| EtherCAT Comms | Applicable Communications Standards | IEC 61158 Type12, IEC 61800-7 CiA402 Drive Profile | ||||||||
| Physical Layer | 100BASE-TX (IEEE802.3) | |||||||||
| Communications Connectors | X4-IN (RJ45): EtherCAT signal input connector X5-OUT (RJ45): EtherCAT signal output connector |
|||||||||
| Cable | Category 5, Shielded/Foiled Twisted Pairs (CAT5e SF/UTP) | |||||||||
| Sync Manager | SM0: Mailbox output, SM1: Mailbox input, SM2: Process data output, and SM3: Process data input | |||||||||
| FMMU | FMMU 0: Mapped in process data output (RxPDO) area. FMMU 1: Mapped in process data input (TxPDO) area. FMMU 2: Mapped to mailbox status. |
|||||||||
| EtherCAT Commands (Data Link Layer) | APRD, FPRD, BRD, LRD, APWR, FPWR, BWR, LWR, ARMW, FRMW (APRW, FPRW, BRW, and LRW commands are not supported.) | |||||||||
| Process Data | Assignments can be changed with PDO mapping. | |||||||||
| MailBox (CoE) | Emergency messages, SDO requests, SDO responses. | |||||||||
| MailBox (foE) | Supports firmware update via FoE | |||||||||
| MailBox (EoE) | Supports firmware update via EoE | |||||||||
| Distributed Clocks | Free-Run Mode and DC Mode (Can be switched). Applicable DC cycles: 125 μs to 8 ms | |||||||||
| Slave Information Interface | 256 bytes (read-only) | |||||||||
| CiA402 Drive Profile | Cyclic Synchronous Position Mode Cyclic Synchronous Velocity Mode Cyclic Synchronous Torque Mode Touch Probe Function Torque Limit Function Homing Mode Profile Position Mode Profile Velocity Mode Profile Torque Mode Interpolated Position Mode |
|||||||||
| Display | One 7-segment LED | |||||||||
| Indicator Lamps | CHARGE, POWER, RUN, SYS, ERR, L/A IN, L/A OUT | |||||||||
| Regenerative Processing | DX4-1A5*, DX4-101*, DX4-102* and DX4-104* must connect an external regenerative resistor. Other models are built in. |
|||||||||
| Protective Functions | Overcurrent, Overvoltage, Undervoltage, Overload, Regeneration Error, Overspeed, etc. | |||||||||
| Utility Functions | Alarm history, Jogging, Load inertia identification, Auto-Tuning, etc. | |||||||||
| Safe Torque Off | According to IEC 61800-5-2. Cat.4, PLe according to ISO 13849-1, SIL3 according to IEC 61508, IEC 62061. |
|||||||||
| 驱动器 | 电动机 | 编码器电缆 | 电力电缆 | 设计 | 零件编号 | 模型 | 零件编号 | 模型 | 零件编号 | 模型 | 零件编号 | 模型 |
|---|---|---|---|---|---|---|---|---|
| 50W,无制动器,Abs编码器,高速,低惯性 | D0108 | DX4-1A5AJA | M0758 | MXL-A5A0430LA222 | X0400-X0404 (inc) X0405-X0409 (abs) |
EC3S-I1724-RX-xx (inc) EC3S-A1724-RX-xx (abs) |
X0500-X0504 | EC3P-N8718-RX-xx |
| 50W,带制动器,Abs编码器,高速,低惯性 | M0759 | MXL-A5A0430LA242 | X0505-X0509 | EC3P-B8718-RX-xx | ||||
| 100W,无制动器,Abs编码器,高速,低惯性 | D0107 | DX4-101AJA | M0756 | MXL-01A0430LA222 | X0400-X0404 (inc) X0405-X0409 (abs) |
EC3S-I1724-RX-xx (inc) EC3S-A1724-RX-xx (abs) |
X0500-X0504 | EC3P-N8718-RX-xx |
| 100W,带制动器,Abs编码器,高速,低惯性 | M0757 | MXL-01A0430LA242 | X0505-X0509 | EC3P-B8718-RX-xx | ||||
| 200W, 无制动器,Abs编码器,高速,低惯性 | D0106 | DX4-102AJA | M0652 | MXL-02A0630FA222 | X0400-X0404 | EC3S-I1724-RX-xx | X0500-X0504 | EC3P-N8718-RX-xx |
| 200W, 带制动器,Abs编码器,高速,低惯性 | M0653 | MXL-02A0630FA242 | X0505-X0509 | EC3P-B8718-RX-xx | ||||
| 200W, 无制动器,Abs编码器,高速,低惯性 | M0654 | MXL-02A0630LA222 | X0405-X0409 | EC3S-A1724-RX-xx | X0500-X0504 | EC3P-N8718-RX-xx | ||
| 200W,带制动器,Abs编码器,高速,低惯性 | M0655 | MXL-02A0630LA242 | X0505-X0509 | EC3P-B8718-RX-xx | ||||
| 400W, 无制动器,Abs编码器,高速,低惯性 | D0105 | DX4-104AJA | M0644 | MXL-04A0630FA222 | X0400-X0404 | EC3S-I1724-RX-xx | X0500-X0504 | EC3P-N8718-RX-xx |
| 400W, 带制动器,Abs编码器,高速,低惯性 | M0645 | MXL-04A0630FA242 | X0505-X0509 | EC3P-B8718-RX-xx | ||||
| 400W, 无制动器,Abs编码器,高速,低惯性 | M0646 | MXL-04A0630LA222 | X0405-X0409 | EC3S-A1724-RX-xx | X0500-X0504 | EC3P-N8718-RX-xx | ||
| 400W,带制动器,Abs编码器,高速,低惯性 | M0647 | MXL-04A0630LA242 | X0505-X0509 | EC3P-B8718-RX-xx | ||||
| 750W, 无制动器,Abs编码器,高速,低惯性 | D0104 | DX4-108AJA | M0636 | MXL-08A0830FA222 | X0400-X0404 | EC3S-I1724-RX-xx | X0500-X0504 | EC3P-N8718-RX-xx |
| 750W, 带制动器,Abs编码器,高速,低惯性 | M0637 | MXL-08A0830FA242 | X0505-X0509 | EC3P-B8718-RX-xx | ||||
| 750W, 无制动器,Abs编码器,高速,低惯性 | M0638 | MXL-08A0830LA222 | X0405-X0409 | EC3S-A1724-RX-xx | X0500-X0504 | EC3P-N8718-RX-xx | ||
| 750W,带制动器,Abs编码器,高速,低惯性 | M0639 | MXL-08A0830LA242 | X0505-X0509 | EC3P-B8718-RX-xx | ||||
| 1000W, 无制动器,Abs编码器,高速,低惯性 | D0103 | DX4-110AJA | M0628 | MXL-10A0830FA222 | X0400-X0404 | EC3S-I1724-RX-xx | X0500-X0504 | EC3P-N8718-RX-xx |
| 1000W, 带制动器,Abs编码器,高速,低惯性 | M0629 | MXL-10A0830FA242 | X0505-X0509 | EC3P-B8718-RX-xx | ||||
| 1000W, 无制动器,Abs编码器,高速,低惯性 | M0630 | MXL-10A0830LA222 | X0405-X0409 | EC3S-A1724-RX-xx | X0500-X0504 | EC3P-N8718-RX-xx | ||
| 1000W, 带制动器,Abs编码器,高速,低惯性 | M0631 | MXL-10A0830LA242 | X0505-X0509 | EC3P-B8718-RX-xx | ||||
| 1000W, 无制动器,Abs编码器,高速,低惯性 | M0620 | MXM-10A1320FD223 | X0410-X0414 | EC3S-I1324-RX-xx | X0510-X0514 | EC3P-N9314-RX-xx | ||
| 1000W, 带制动器,Abs编码器,高速,低惯性 | M0621 | MXM-10A1320FD243 | X0515-X0519 | EC3P-B9314-RX-xx | ||||
| 1000W,无制动器,Abs编码器,高速,低惯性 | M0622 | MXM-10A1320LB223 | X0415-X0419 | EC3S-A1324-RX-xx | X0510-X0514 | EC3P-N9314-RX-xx | ||
| 1000W, 带制动器、Abs编码器、中速、中等惯性 | M0623 | MXM-10A1320LB243 | X0515-X0519 | EC3P-B9314-RX-xx | ||||
| 1500W, 无制动器,Abs编码器,高速,低惯性 | D0102 | DX4-115AJA | M0612 | MXM-15A1320FD223 | X0410-X0414 | EC3S-I1324-RX-xx | X0500-X0504 | EC3P-N9314-RX-xx |
| 1500W, 带制动器、Inc编码器、中速、中等惯性 | M0613 | MXM-15A1320FD243 | X0505-X0509 | EC3P-B9314-RX-xx | ||||
| 1500W, 无制动器,Abs编码器,中速,中等惯性 | M0614 | MXM-15A1320LB223 | X0415-X0419 | EC3S-A1324-RX-xx | X0500-X0504 | EC3P-N9314-RX-xx | ||
| 1500W, 带制动器、Abs编码器、中速、中等惯性 | M0615 | MXM-15A1320LB243 | X0505-X0509 | EC3P-B9314-RX-xx | ||||
| 2000W, 无制动器,Abs编码器,高速,低惯性 | D0101 | DX4-120AJA | M0604 | MXM-20A1320FD223 | X0410-X0414 | EC3S-I1324-RX-xx | X0500-X0504 | EC3P-N9314-RX-xx |
| 2000W, 带制动器、Inc编码器、中速、中等惯性 | M0605 | MXM-20A1320FD243 | X0505-X0509 | EC3P-B9314-RX-xx | ||||
| 2000W, 无制动器,Abs编码器,中速,中等惯性 | M0606 | MXM-20A1320LB223 | X0415-X0419 | EC3S-A1324-RX-xx | X0500-X0504 | EC3P-N9314-RX-xx | ||
| 2000W, 带制动器、Abs编码器、中速、中等惯性 | M0607 | MXM-20A1320LB243 | X0505-X0509 | EC3P-B9314-RX-xx | ||||
| 3000W, 无制动器,Abs编码器,高速,低惯性 | D0100 | DX4-130AJA | M0600 | MXM-30A1820FD223 | X0420-X0424 | EC3S-I1424-RX-xx | X0530-X0534 | EC3P-N9413-RX-xx |
| 3000W, 带制动器、Inc编码器、中速、中等惯性 | M0601 | MXM-30A1820FD243 | ||||||
| 3000W, 无制动器,Abs编码器,中速,中等惯性 | M0602 | MXM-30A1820LA223 | X0425-X0429 | EC3S-A1424-RX-xx | X0530-X0534 | EC3P-N9413-RX-xx | ||
| 3000W, 带制动器、Abs编码器、中速、中等惯性 | M0603 | MXM-30A1820LA243 | ||||||
| 下载 | ||||||||
|---|---|---|---|---|---|---|---|---|
最新版本 :
|
| 控制器固件 - MC664(X) |
||||||||
|---|---|---|---|---|---|---|---|---|
最新版本 :
|
| 控制器固件 - MC4N-ECAT |
||||||||
|---|---|---|---|---|---|---|---|---|
最新版本 :
|
| 控制器固件 - MC6N-ECAT |
||||||||
|---|---|---|---|---|---|---|---|---|
最新版本 :
|
| 控制器固件 - Flex-6 Nano |
||||||||
|---|---|---|---|---|---|---|---|---|
最新版本 :
|
| DRIVE FIRMWARE - DX4 -1A5A, -101A, -102A, -104A |
||||||
|---|---|---|---|---|---|---|
最新版本 :
|
| DRIVE FIRMWARE - DX4 -108A, -110A, -115A |
||||||
|---|---|---|---|---|---|---|
最新版本 :
|
| DRIVE FIRMWARE - DX4 -120A, -130A |
||||||
|---|---|---|---|---|---|---|
最新版本 :
|
| 指南 | |
|---|---|
| 数据表 | |
| 快速启动指南 | 简易安装指南 |
| EMC | Trio产品电磁兼容性指南第4版 |
| 认证 | |
|---|---|
| EU | P600 - P605 |
| UL Listing | 请点开链接并在搜索框中输入UL文件号E238097进行下载。 |
| EtherCAT 数据 | |
|---|---|
| EtherCAT扩展文件 | EtherCAT从站配置和设置 |
| EtherCAT文件 | EtherCAT说明文件 |
| 视频 | EtherCAT说明视频 |
| 现场总线数据 | |
|---|---|
| EtherNet IP EDS (电子数据表) 文件 | EtherNet IP EDS (电子数据表) 文件 |
| CAD 数据 | |
|---|---|
| Flex-6 Nano的设计图格式有DXF、IGES、DWG和 STEP,这些文件都可在如下的压缩文件里下载: | |
| 用户技术支持 | |
|---|---|
| Trio英文网站技术支持论坛 | Trio拥有全球技术支持网络,为我们的经销商、解决方案合作伙伴和客户提供相关技术信息。该页面包括知识库、用户论坛和在线咨询系统。我们在英国、美国、印度和中国的分子公司的工程师将会为相关问题提供解答。 |
| 培训 | 我们为期一天的入门培训课程主要是介绍所有运动控制器产品及Motion-iX编程。课程的每个主题都基于实际操作案例,使参加培训的人员都可获得采用Motion Perfect开发应用的实践经验。 |
| 维修 | 通过我们的经销商网络,我们提供固定价格的维修服务。此部分具体介绍我们为客户提供的维修服务。 |
▴


