EtherCAT
经济型主站
MC4N-ECAT
P900 (2 轴) | P901 (4 轴) | P902 (8 轴) | P903 (16 轴) | P904 (32 轴)
MC4N-ECAT是通过EtherCAT实时自动化总线运行远程伺服和步进驱动的高功能运动控制器。它基于高性能的532MHz ARM11处理器,使其适用于多轴设备和机器人应用。


功能特点
- 达32个EtherCAT数字驱动轴
- 支持位置、速度和力矩模式
- 多达1024个I/O
- EtherCAT CoE协议支持到CiA402
- 直线、圆弧、螺旋线和空间圆弧插补
- 灵活的凸轮曲线,主从运动
- 绝对值编码器接口
- 支持Biss、EnDAT和SSI绝对值编码器
- 硬件连接输出到视觉和激光控制
- Ethernet-IP / Modbus TCP / Trio ActiveX / Uniplay HMI / UDP / 以太网内置接口
- 532MHz ARM11处理器,精确的64位运动计算
- 支持IEC 61131-3语言编程
- 支持多任务TrioBASIC语言编程
- 文本文件处理
- 机器人坐标变换
- 4路高速色标输入
- 独立的RS232和RS485接口
- 支持SD卡
- EtherCAT I/O扩展
- CANopen I/O扩展
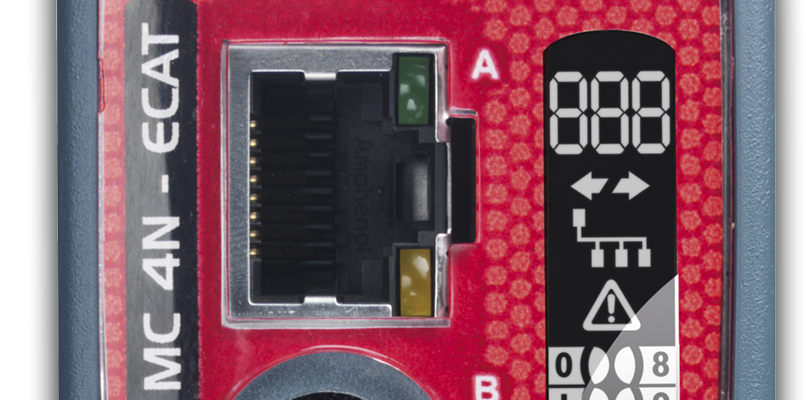
- 背光液晶显示屏
- RoHS、CE认证
即插即用
MC4N-ECAT支持最大32轴运动控制,64位超高精度位置分辨率。EtherCAT从站伺服和I/O可以相互连接并在位置、速度和力矩模式中循环同步运行。

EtherCAT
P900有2个内置EtherCAT轴。可购买P912远程轴FEC升级更多轴。
每个P912都使远程轴扩展两倍,例如:
P900 + 1 x P912 = 4个远程轴
P900 + 2 x P912 = 8个远程轴
P900 + 3 x P912 = 16个远程轴
P900 + 4 x P912 = 32个远程轴
也可以购买带相应轴数的MC4N-ECAT控制器,例如:
P900 = 2 轴
P901 = 4 轴
P902 = 8 轴
P903 = 16 轴
P904 = 32 轴
每个轴都可通过编程实现各种运动,如进行直线、螺旋线、空间圆弧插补、电子凸轮和主从运动以及电子齿轮等运动。MC4N-ECAT也支持多种机器人算法同时进行。
简单易用

通过明亮易读的背光显示屏可以轻松获悉控制器的状态,同时底座的单金属外壳增强了系统的接地性能,提高了系统在工业现场的抗干扰能力。
工具
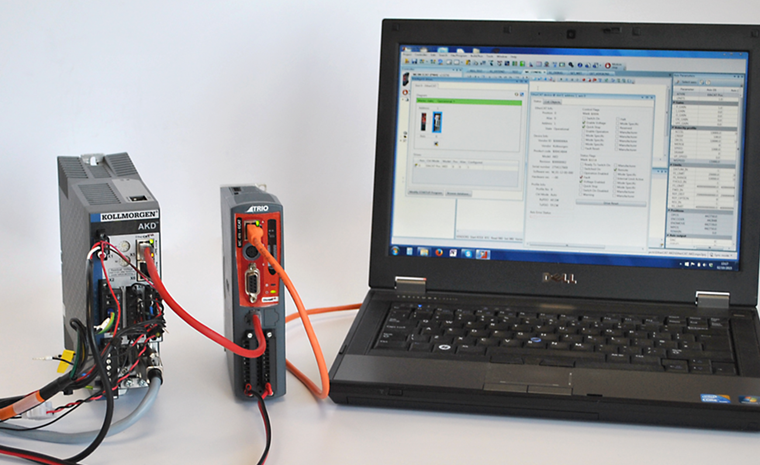
内置的以太网口可连接PC机编程及下载程序或连接通用HMI和PLC,包括Trio Uniplay触摸屏直接连接到MC4N控制器。基于功能强大的Motion Perfect v4应用开发软件,用户程序可用具有多任务特点的TrioBASIC语言编写,令复杂的运动变得简单化。同时也可使用支持全功能的PLC编程系统的工业标准IEC61131-3语言编程。
 |
|---|
| 产品 | P900 MC4N-ECAT |
|---|---|
| 描述 | 32轴面板安装EtherCAT 控制器 |
| 品名 | MC4N-ECAT |
| 型号 | P900 |
| 状态 | 在售 |
| 配置 | P900 MC4N-ECAT |
|---|---|
| 轴 0 | 扩展 |
| 轴 1 | |
| 轴 2 | |
| 轴 3 | |
| 轴 4 | |
| 轴 5 | |
| 轴 6 | |
| 轴 7 |
| 轴 | P900 MC4N-ECAT |
|---|---|
| 最大轴 | 32 |
| 最大网络轴 | 32 |
| 最大虚拟轴 | 32 |
| 最大离散接线轴 | 1 |
| 性能 | P900 MC4N-ECAT |
|---|---|
| 核 | 1 |
| 处理器 | ARM11 |
| 时钟频率 | 532 MHz |
| 数学精度 | IEEE 457双进度 |
| 位置色标精度 | 64 位 |
| 执行基准 | 51行/ms |
| 实时时钟 | 支持 |
| 闪存 | 32 x 16000 |
| 用户内存 | 8 MB |
| Table内存 | 512000 |
| 最短预期闪存寿命(正常使用 | 42 年 |
| 最大VR变量 | 4096 |
| 最大伺服周期 | 2000 µs |
| 最短伺服周期 | 125 µs |
| 最大编码器输入频率 | 6.000 MHz |
| 最大步进输出频率 | 2.000 MHz |
| 驱动接口 | P900 MC4N-ECAT |
|---|---|
| 辅助轴 | 不支持 |
| EtherCAT | 支持 |
| 液压系统 | 不支持 |
| 压电电机 | 不支持 |
| 松下RTEX | 不支持 |
| SERCOS | 不支持 |
| 伺服 | 不支持 |
| SLM | 不支持 |
| 步进/脉冲 | 轴0 |
| 通讯 | P900 MC4N-ECAT |
|---|---|
| Anybus | 不支持 |
| 蓝牙 | 不支持 |
| CANopen | 支持 |
| CC-Link | 不支持 |
| DeviceNet | 支持 |
| Ethernet | 支持 |
| EthernetIP | 支持 |
| Hostlink | 支持 |
| MODBUS-RTU | 支持 |
| MODBUS-TCP/IP | 支持 |
| Profibus | 不支持 |
| ProfiNet | 不支持 |
| RS232/RS485 | 支持 |
| USB 1.1 | 不支持 |
| 编码器接口 | P900 MC4N-ECAT |
|---|---|
| 反馈输入 | 不支持 |
| 增量式 (A+B)输出 | 支持 |
| 脉冲方向输出 | 支持 |
| 参考输入 | 支持 |
| SSI绝对值输入 | 支持 |
| EnDat绝对值输入 | 支持 |
| Tamagawa绝对值输入 | 支持 |
| BiSS绝对值输入 | 支持 |
| 内部I/O | P900 MC4N-ECAT |
|---|---|
| +/-10V模拟量输出 | 0 |
| 模拟量输出精度 | 12 位 |
| 模拟量输入 (0-10V) | 0 |
| 模拟量输入精度 | 12 位 |
| 数字量双向I/O (24V) | 8 |
| 数字量输入 (24V直流电) | 8 |
| 数字量输出 (24V直流电) | 0 |
| 色标输入 | 4 |
| 色标速度 | 1 µs |
| 看门狗(Watchdogs ) | 1 |
| 看门狗评级 | 最大29V, 100mA |
| 外部I/O | P900 MC4N-ECAT |
|---|---|
| +/-10V模拟量输出 | 16 |
| 模拟量输出精度 | 12位 |
| +/-10V模拟量输入 | 32 |
| 模拟量输入精度 | 12位 |
| 数字量 I/O点 | 1024 |
| 编程 | P900 MC4N-ECAT |
|---|---|
| Trio BASIC | 支持 |
| DXF 输入 | 支持 |
| G-Code | 支持 |
| HPGL | 支持 |
| IEC61131 | 支持 |
| 机器人算法 | 可选 |
| 最大程序 | 64 |
| 最大任务 | 22 |
| 软件 | P900 MC4N-ECAT |
|---|---|
| Motion Perfect版本 | 4 |
| 扩展 | P900 MC4N-ECAT |
|---|---|
| 扩展模块类型 | 无 |
| 最大模块 | 0 |
| 内存卡 | SD |
| 物理 | P900 MC4N-ECAT |
|---|---|
| 最高操作温度 | 45 °C |
| 最低操作温度 | 0 °C |
| 安装 | 面板 |
| 深 | 120.0 mm |
| 高 | 157.0 mm |
| 宽 | 40.0 mm |
| 重量 | 432 g |
| 电源 | P900 MC4N-ECAT |
|---|---|
| 供电电流 | 350 mA |
| 电源容限 | +/- 20% |
| 供电电压 | 24 V |
| 认证 | P900 MC4N-ECAT |
|---|---|
| CE | 支持 |
| RoSH | 支持 |
| UL | 支持 |

轴配置
| 标准功能 | |||
|---|---|---|---|
标准轴 – 可以在软件上配置,作为步进脉冲方向输出或伺服驱动,也可配置为增量式编码器反馈 。 标准功能是一套ATYPE (轴类型) 所有控制器都具备此功能。这些ATYP都基于脉冲输出和增量式编码器反馈。 |
|||
| ATYPE | 描述 | ||
| 43 | 带使能输出的脉冲方向输出 | ||
| 45 | 带使能输出的正交编码器输出 | ||
| 63 | 带Z输入的脉冲方向输出 | ||
| 64 | 带Z输入的正交编码器输出 | ||
| 76 | 带Z输入的增量式编码器 | ||
| 78 | 带VFF_GAIN和使能输出1的脉冲方向 | ||
| 扩展功能 | ||||
|---|---|---|---|---|
扩展轴 – 除了标准功能,这些轴也可以配置为绝对值编码器和闭环伺服(需要电压输出)。 只有标记模拟量闭环伺服的轴有模拟量输出并做闭环控制。 |
||||
| ATYPE | 描述 | |||
| 30 | 模拟量反馈伺服 | |||
| 44 | 带Z输入的增量式编码器伺服 | |||
| 46 | Tamagawa绝对值伺服 | |||
| 47 | Endat 绝对值伺服 | |||
| 48 | SSI绝对值伺服 | |||
| 60 | 带Z输入的脉冲方向反馈伺服 | |||
| 77 | 带使能输出的增量式编码器伺服 | |||
| 92 | Biss绝对值伺服 | |||
 规格 规格 |
|
|---|---|
| 速度 | 100Mbps |
| 物理层 | 100BASE-TX全双工 (IEEE 802.3) |
| 电缆 | 屏蔽双绞线 (TIA/EIA-568B CAT5e) |
| 拓扑 | 线型、树型和星型(1) |
| 绝缘 | 脉冲变压器带共模电感 |
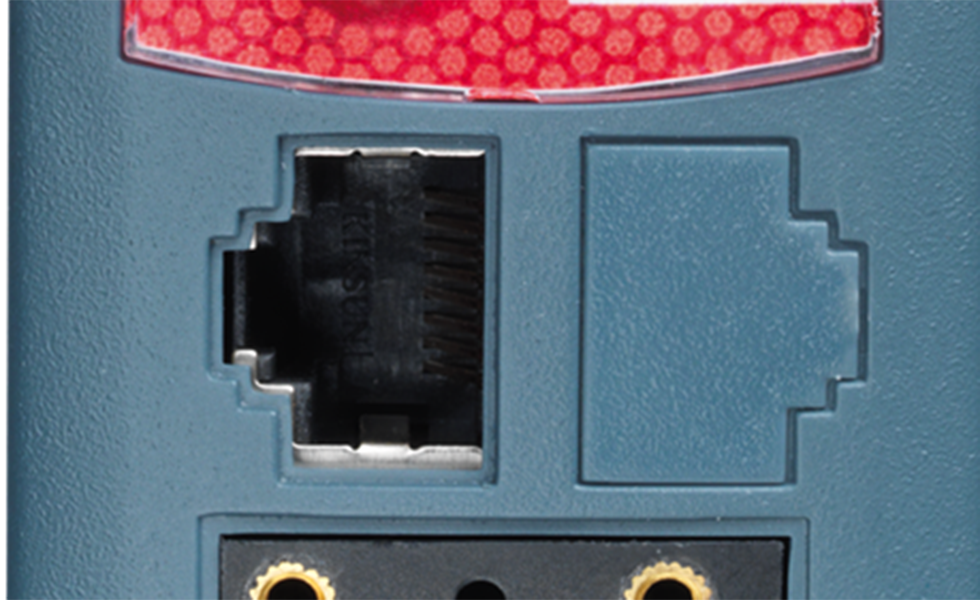
| 连接头 | RJ45 |
| 电缆长度 | 节点间距最大为100米 |
| 循环周期 | 125μsec (Flex-6 Nano/MC6N), 250μsec (MC664X), 500 μsec, 1000 μsec, 2000 μsec or 4000 μsec (MC664, Flex-6 Nano, MC6N) |
| 同步 | 分布式时钟技术,振动< 1 µsec |
| 协议 | CoE, SoE (2) |
| 轴数 | 32 (MC4N), 64 (MC464+P876), 128 (MC664X), 64 (PC-MCAT), 64 (Flex-6 Nano, MC6N) |
| 节点数 | 最多128个从站节点 |
| 运动模式 | 循环同步位置、循环同步速度、循环同步力矩 |
| 参数转换 | CoE对象读取/书写。SoE IDN读取/书写 |
| 输入/输出 | 多达1024路输入/输出 |
| (1) 树形和星型网络拓扑需要使用EtherCAT专用交换机。 (2) 基于EtherCAT的的CanOpen应用协议(COE)。 基于EtherCAT的符合IEC 61491的伺服驱动器(SoE)。 |
|
| 产品 - FLEXSLICE模块 |
|---|
Flexslice耦合器 (P366) P366 Flexslice耦合器将来自以太网100BASE-T的报文转换为EBUS信号格式。每个站包含一个P366耦合器和多达16个Flexslice模块。 |
Flexslice 16路PNP输出 (P371) P371数字量输出模块把运动控制器的二进制控制信号连接到机器的24V直流输出设备。 |
Flexslice 16路PNP输入 (P372) P372数字量输入模块把24V直流信号从机器设备连接到运动控制器中的二进制控制寄存器。 |
Flexslice Flex 3轴 (P375) P375 Flexslice 3轴步进脉冲模块可控制多达3个带脉冲方向和编码器输出信号的步进电机或带A/B色标输入的编码器。 |
Flexslice 16路NPN输出 (P376) P376数字量输出模块把控制器的二进制控制信号连接到机械输出设备,例如继电器、连接头、阀门、灯具等(24V直流电)。 |
Flexslice 16路NPN输入 (P377) P377数字量输入模块把24V直流信号从机器设备连接到运动控制器中的二进制控制器寄存器。 |
Flexslice 8路模拟量输出 (P378) P378 Flexslice 8路模拟量输出模块有8个可编程的电压输出接线端子,每个数字化为12位分辨率。 |
Flexslice 8路模拟量输入 (P379) P379 Flexslice 8路模拟量输入模块有8个可编程的电压接线端子,每个数字化为12位分辨率。 |
| 产品 - CAN I/O模块 |
|---|
CAN 16路输出I/O模块(P317) Trio CAN16路输出模块有256个24V直流分布式输出通道。所有点都是耐短路并且完全与CANbus隔离。P317模块可与CAN I/O系列的其它类型的模块在同一条总线上。 |
CAN 16路输入I/O模块 (P318) Trio CAN16路输入模块有256个24V直流分布式输入通道。所有的输入点都是高电平(24V输入=启动),并且完全与CANbus隔离。 |
CAN16路I/O模块 (P319) Trio CAN16路输入/输出模块有256个24V直流分布式双向输入和输出通道。所有的输入点都是高电平(24V=启动)。所有的输出都耐短路且完全与CAN总线隔离。 |
CAN 8路输入/4路输出模块 (P326) CAN模拟量I/O模块为Trio运动控制器提供了紧凑的导轨安装模拟量输入/输出功能。每个模块都带8路12位(+/-10V)模拟量输入通道和4路12位(+/-10V)模拟量输出通道。 |
CAN 8路继电器模块 (P327) Trio CAN8路继电器模块有128路分布式小功率继电器通道,包括高达30V的直流电通道和49V的交流电通道。所有输出点都不带电压,同时与CANbus完全隔离。P327模块可与Trio I/O系列的其它模块在同一条总线上。 |
| 产品 - 通用 |
|---|
UNIPLAY HMI (7") (P843) Trio独特的UNIPLAY HMI触摸屏系统使操作界面变得更好、更简单、安全。UNIPLAY系列触摸屏有7寸版本。 |
| UNIPLAY HMI (10") (P844) Trio独特的UNIPLAY HMI触摸屏系统使操作界面变得更好、更简单、安全。UNIPLAY系列触摸屏有10寸版本。 |
| 固件 - MC4N ECAT | ||||||||
|---|---|---|---|---|---|---|---|---|
|
最新版本 :
|
||||||||
| 软件 - 编程 |
|---|
| Motion Perfect Motion Motion Perfect使运动控制器的设置、诊断、调试和使用变得更加简单。它为用户提供了一个基于Windows的更易理解的界面,可进行快速应用开发、控制器配置及控制进程监控。 |
| IEC 61131-3运行时软件 (P877) IEC 61131-3对编程语言、指令集以及工程的处理和结构进行了标准化。IEC 61131-3系统在上电后可运行1小时,工程师可在控制器上调试其程序。如果要持续运行,则需要为控制器购买用于运行IEC程序的功能启用码。用户可登陆Trio英文网站E-Store自行购买或从经销商处购买。 . |
| 软件 - 扩展轴 |
|---|
| 机器人算法功能使能码 (P750) P750机器人算法支持更复杂的FRAME转换,可轻松编程各种类机器人,包括SCARA和Delta。 (可登陆Trio英文网站E-Store购买)。 |
| 2 x EtherCAT远程轴使能码 (P912) 控制器有2个内置EtherCAT轴,可购买P912远程轴功能使能码升级更多轴。 每个P912都使以下控制器扩展两倍,例如: 控制器 + 1 x P912 = 4个远程轴 控制器 + 2 x P912 = 8个远程轴 控制器 + 3 x P912 = 16个远程轴 控制器 + 4 x P912 = 32个远程轴 控制器 + 5 x P912 = 64个远程轴 (可登陆Trio英文网站E-Store购买)。 |
| 软件 - 应用程序 |
|---|
| CAD2Motion 此程序支持用户在CAD软件包中创建运动路径,例如AutoCAD,并通过一个Trio运动控制器把运动路径转换为可执行的代码。 |
| AutoLoader AutoLoader是一个紧凑、自包含的软件包。它使Motion Perfect编写的工程发布变得非常简单。只需将工程添加到AutoLoader文件夹中,然后编辑一个脚本文件以提供加载顺序控制就可把工程发送给客户。 |
| Trio MCLoader Trio MC Loader是一个 Windows ActiveX控件,可以把工程(采用Motion Perfect编程)和程序加载到运动控制器。可通过串行链接 、USB、Ethernet或基于控制器的PCI与控制器进行通讯。 |
| Trio PCMotion PCMotion是一个ActiveX控件,支持自定义的用户应用直接连接到Trio运动控制器。它可用于控制任意运动控制器的功能,同时把文本文件发送到运动控制器上。 |
| TextFileLoader TextFileLoader支持把文件加载到控制器内存或SD卡上(安装以后)。因此,采用文本语言,例如G-Code和HPGL编写的程序可加载到用TrioBASIC程序解析和执行的控制器上。通过优化传输过程可以压缩文件,并减少传输时间。也可把传输过程设置为将文件引入到控制器上的FIFO缓冲器中。当文件很大时,这有助于减少机器的循环周期,增强通讯效果。 |
| 指南 | |
|---|---|
| 数据表 | |
| 快速启动指南 | 简易安装指南 |
| EMC | Trio产品电磁兼容性指南第4版 |
| 认证 | |
|---|---|
| EU | P600 - P605 |
| UL Listing | 请点开链接并在搜索框中输入UL文件号E238097进行下载。 |
| EtherCAT 数据 | |
|---|---|
| EtherCAT扩展文件 | EtherCAT从站配置和设置 |
| EtherCAT文件 | EtherCAT说明文件 |
| 视频 | EtherCAT说明视频 |
| 现场总线数据 | |
|---|---|
| EtherNet IP EDS (电子数据表) 文件 | EtherNet IP EDS (电子数据表) 文件 |
| CAD 数据 | |
|---|---|
| Flex-6 Nano的设计图格式有DXF、IGES、DWG和 STEP,这些文件都可在如下的压缩文件里下载: | |
| 用户技术支持 | |
|---|---|
| Trio英文网站技术支持论坛 | Trio拥有全球技术支持网络,为我们的经销商、解决方案合作伙伴和客户提供相关技术信息。该页面包括知识库、用户论坛和在线咨询系统。我们在英国、美国、印度和中国的分子公司的工程师将会为相关问题提供解答。 |
| 培训 | 我们为期一天的入门培训课程主要是介绍所有运动控制器产品及Motion-iX编程。课程的每个主题都基于实际操作案例,使参加培训的人员都可获得采用Motion Perfect开发应用的实践经验。 |
| 维修 | 通过我们的经销商网络,我们提供固定价格的维修服务。此部分具体介绍我们为客户提供的维修服务。 |
| 首选ETHERCAT合作伙伴 | 加入日期 | 网址 |
|---|---|---|
| March - 2017 | Estun.com | |
 |
September - 2014 | delta-americas.com |
| October - 2014 | panasonic-electric-works.com | |
 |
November - 2014 | JVL.dk |
| December - 2014 | a-m-c.com | |
 |
February - 2016 | Animatics.com |
| April - 2016 | Fastech.co.kr | |
| April - 2017 | rta.it | |
 |
May - 2017 | applied-motion.com |
| 其它合作厂家 (ETHERCAT) | 驱动器 | 编码器 | I/O模块 |
|---|---|---|---|
| ABB | ACS355, ACS850, ACSM1-M, ACSM1-S, FECA-01, MICROFLEX | ||
| ACS Motion | ACS SPIIPLUS | ||
| Arnold Mueller GmbH & Co. KG | IC, KW (-R03) | ||
| Applied Motion Products | SSxx-EC-D | ||
| Bachmann | Bachmann slv | ||
| Baumer | BM4-O-ECT-01-01, BMAxx | Encoder 2, 4 & 10byte | |
| Baumer Thalheim | ATD2, ATD4 & POE | ||
| Bernecker + Rainer Industrie Elektronik Ges.m.b.H. | |||
| Baumueller | bmaXX 4400 | ||
| Beckhoff | AX2000 | EP5101 | EL6752, EL1088 |
| Bonfiglioli Vectron GmbH | |||
| Bosch Rexroth AG | |||
| Brooks Instrument B.V. | |||
| Brunner Elektronik AG | |||
| Burster praezisionsmesstechnik | |||
| Comet Technologies USA | |||
| Control Techniques | Digitax, Unidrive SP | ||
| Copley Drives | Xenus+, Accelnet+ | ||
| Danfoss GmbH | |||
| Deutshmann | Unigate IC | ||
| Dunkermotoren | BGxx | ||
| Eltromat | ELTROMAT RSH | ||
| Elmo | ELMO Drive | ||
| ESD electronic system design gmb | |||
| ESR Pollmeier | Midi Drive, Trio Drive | ||
| ESItron | ESImotor | ||
| Estun | ProNet | ||
| FASTECH | |||
| Festo | CPX-FB38 | ||
| Gefran SPA | |||
| Groschoppbv | |||
| Grossenbacher | GESYS MEC | ||
| HIGEN Motor Co., Ltd. | |||
| Hilscher | NETX_IO | ||
| IAI | ACON (does not support cyclic mode) | ||
| Iba-AG | |||
| Inficon AG | |||
| Infranor | XtraplusPak | ||
| Imficon | INFICON PG | ||
| JAT | ECOCOMPACT | ||
| Jenaer Antriebstechnik GmbH | |||
| Jenny Science | Xenax | ||
| KEB | KEB 1648F5 | ||
| KEYENCE | |||
| Kuebler | MT-5868 Encoder | ||
| Kuhnke | 694_400 | ||
| Kollmorgen | AKD, AKD-N, S700 | ||
| KUNBUS GmbH | |||
| LEINE & LINDE AB | |||
| Lenze | i700 & 8400 | IOSystem 1000 | |
| LinMot | E1250-EC | ||
| Lika Electronic srl | |||
| LTi Drives | ServoOne, ServoOne Junior | ||
| Maxon Motor | EPOS3, MAXPOS | ||
| MCS Inc | MCS INC | ||
| Metronix | ARS2000 | ||
| Mitsubishi | MR_J3_A | ||
| MKS Intruments | TEMPO VALVE | ||
| Moog | MSD, MSD Compact, Animatics | ||
| MOTEC Servo | |||
| MURR Elektronik | IMPACT 20, IMPACT 67 | ||
| MTS Systems Corp | |||
| Nanotec Electronics | N10 | ||
| National Instruments | 9144 | ||
| Numatics,Inc | |||
| Omron | MX2 inverter, G5 Servo | GXEC0211, GXEC0241 | GRT-ECT I/O |
| ORIENTAL MOTOR | |||
| Parker Hannifin | |||
| Phase Motor Control | AxM-II Series | ||
| Phoenix Contact | |||
| RS Automation | |||
| RTA | Plus ET | ||
| Renesas Electronics Corp. | |||
| Sanyo Denki | RS2 | ||
| Schneider Electric | LXM32M | ||
| Servotronix Motion Control Ltd. | |||
| Sick | Inspector | ||
| Shanghai AMP&MOONS' Automation Co.,Ltd | SS10-EC-D SS05-EC-D SS03-EC-D |
||
| SMC | EX260, EX600 | ||
| Stober | Posidrive | ||
| TDK-Lambda Americas Inc. | |||
| Technosoft | |||
| Texas Instruments Incorporated | |||
| TR-Electronic | Linear and rotary encoders | ||
| TRINAMIC Motion Control GmbH & Co. KG | |||
| TRSystems GmbH | |||
| TR-Electronic | |||
| Tsino-Dynatron Electrical Technology | |||
| TURCK | |||
| Vacon Plc | |||
| VIPA | 053 | ||
| Wenglor Sensor | OCP, ZAC50 | ||
| WAGO | 750-354 | ||
| Watlow Electric Manufacturing | |||
| WEG | |||
| Wenglor sensoric | |||
| Yaskawa | Sigma V |


